
자... 이제야 한 고비를 넘겼습니다.
지금 시간부로 졸업작품 전시회를 마칠 수 있었죠...
이제서야 두다리 쭉 뻗고 잘 수 있으리라 봅니다
....는 페이크고!! 졸업작품 전시회 끝난건 사실이지만....
아직도 산재해 있는 과제들은 물론이고... 다다음주에 있는 창의적 종합 설계 경진대회가 남아있는 것입니다!!
크아악!!! 지금 생각하면 이런 떡밥들 물고 끌려가는게 아니었는데.... 조금 여유롭게 대학생활을 마칠까 했는데 그러질 못하는군요 ;ㅅ; 하드웨어는 좀 만들었다 싶었는데... 코딩에서 망해버리는군요...
그도 그렇듯이, 제 로봇은 종이컵을 옮기는 겁니다. 그런데 로봇팔 회전판과 손에 있는 서보모터에다 신호를 PWM을 인가도 안하고 바로 타이밍을 줬을경우에... 아시는분은 아시리라 봅니다.... 이미 회전판에 힘빠지는 원인까지 철저히 해결했던 터라 고삐풀린 망아지처럼 홱홱 돌아가는 통에 종이컵에 있는 물이 쏟아지기 일쑤죠..
물이 들어간 종이컵 옮기기는 포기!!
결국 빈 종이컵옮기기에 돌입했습니다....;ㅅ; 그것도 팔이 아래로 처지면 종이컵이 가까이 있을때 넘어지기 일쑤고, 그렇다고 좀더 멀리가서 잡자니 힘이 약해서 빠져버리고....(참고로 서보모터는 신호가 들어오지 않을 때 최후에 취하고 있는 각도를 취하게 마련이죠... 그 전에 꽉 집지 못하면 힘이 빠져서 종이컵은 빠져버립니다...) 그립을 좀 해결해 보자고 애꿎은 마우스 패드를 잘라서 붙여보고 했는데도 소용이 없더군요 ;ㅅ;
아... 이런 삽질 끝에 결국 졸업작품 전시회로 갔습니다. 물론 코딩은 개판5분전이죠...그저 앞으로가 뒤로가 왼쪽 오른쪽으로 회전해 팔 위아래로 내려 손오므려 펴, 이런 명령만 조합한게 전부였습니다. 게다가 자리는 어찌나 좁았던지..... 코딩 수정할 노트북 하나에 로봇 올려놓으니깐 자리가 꽉차더군요....(작은 강의실보다 좀 더 큰 세미나실인데 거기에 작품들 40여개 전시해 놨다고 생각해보세요....)
아무튼 자리는 좁으니 보여줄건.... 종이컵 하나 집어서 앞으로 간 다음에 구경꾼에게 전달하고 뒤로빠지는 그런 행동밖에 못보여주죠....(본체 왼쪽, 오른쪽 도는건.... 솔직히 스텝 계산을 못했어요...ㄱ-)
그러면서 교수님들 말씀하시는게......
이거 물건 주는 매너 없구만.(손이 종이컵 딱 떨굴때...)
물 다 쏟아지겠군...
자네가 직접 만들었나?
이런 식의 말씀들이었죠.... 딱히 보여줄만한건 1분도 안됐으니 교수님들은 보고 그냥 다른 곳으로 돌아보러가시고...
아무튼 힘들어 죽겠습니다......어제부터 풀가동하면서 다듬은 터라 긴장감이 풀려야 하지만........
아직 디지털 집적회로 FSM이 남았습니다... 좀 이따 6시 반에 교수님과 직접 면담을 해야 한다구요!!!!!!
이러니 어떻게 긴장감이 풀릴 수 있겠어요 ;ㅅ;
아무튼 저는 이만 물러납니다.......
이번 주말,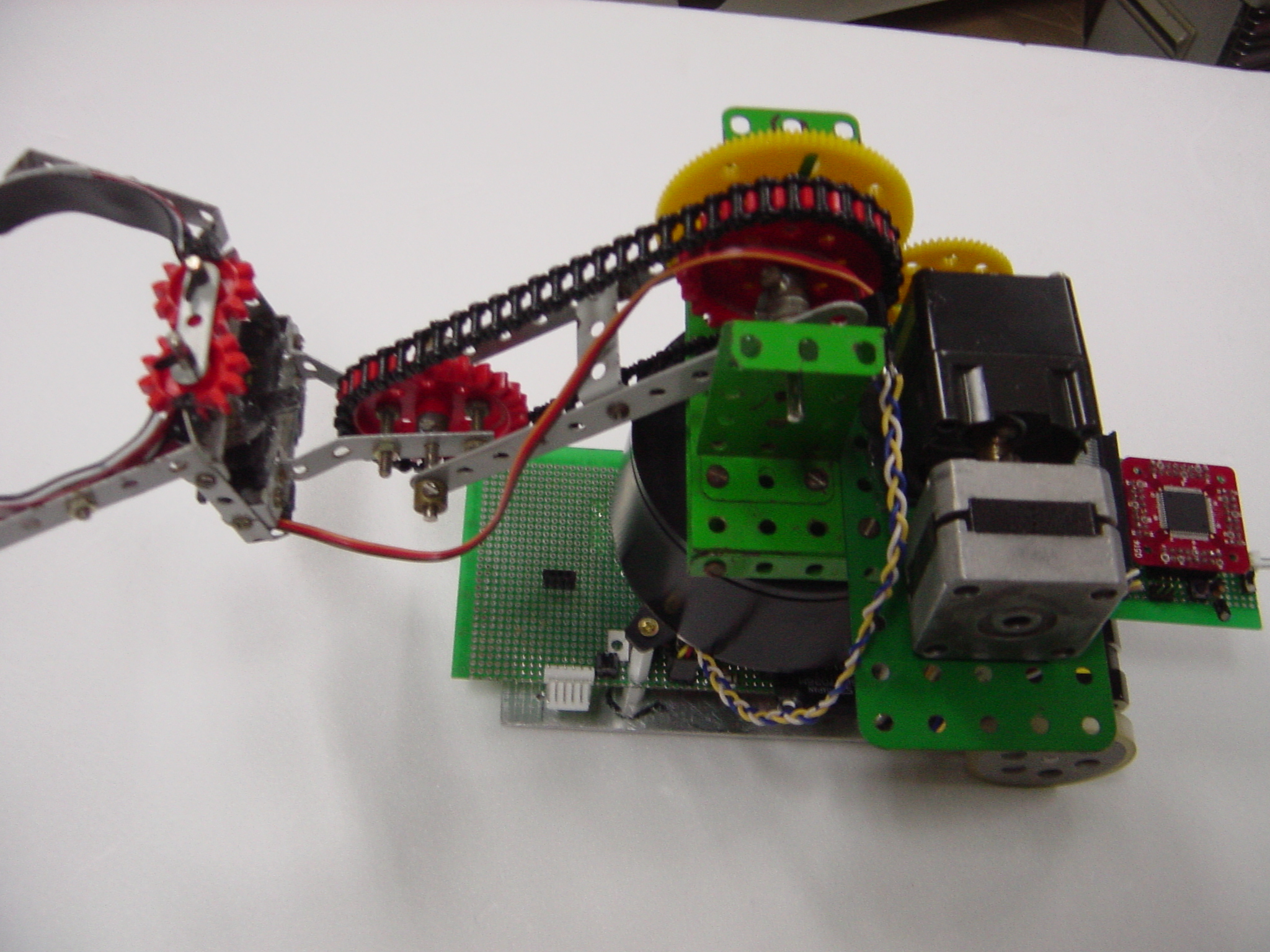
포스가 넘치는 주말이 되길 바랍니다^^ (마지막 사진은 제가 이번 졸작때 낸 로봇입니다....ㄱ- 허접해도 참아주시길.....)
지금 시간부로 졸업작품 전시회를 마칠 수 있었죠...
이제서야 두다리 쭉 뻗고 잘 수 있으리라 봅니다
....는 페이크고!! 졸업작품 전시회 끝난건 사실이지만....
아직도 산재해 있는 과제들은 물론이고... 다다음주에 있는 창의적 종합 설계 경진대회가 남아있는 것입니다!!
크아악!!! 지금 생각하면 이런 떡밥들 물고 끌려가는게 아니었는데.... 조금 여유롭게 대학생활을 마칠까 했는데 그러질 못하는군요 ;ㅅ; 하드웨어는 좀 만들었다 싶었는데... 코딩에서 망해버리는군요...
그도 그렇듯이, 제 로봇은 종이컵을 옮기는 겁니다. 그런데 로봇팔 회전판과 손에 있는 서보모터에다 신호를 PWM을 인가도 안하고 바로 타이밍을 줬을경우에... 아시는분은 아시리라 봅니다.... 이미 회전판에 힘빠지는 원인까지 철저히 해결했던 터라 고삐풀린 망아지처럼 홱홱 돌아가는 통에 종이컵에 있는 물이 쏟아지기 일쑤죠..
물이 들어간 종이컵 옮기기는 포기!!
결국 빈 종이컵옮기기에 돌입했습니다....;ㅅ; 그것도 팔이 아래로 처지면 종이컵이 가까이 있을때 넘어지기 일쑤고, 그렇다고 좀더 멀리가서 잡자니 힘이 약해서 빠져버리고....(참고로 서보모터는 신호가 들어오지 않을 때 최후에 취하고 있는 각도를 취하게 마련이죠... 그 전에 꽉 집지 못하면 힘이 빠져서 종이컵은 빠져버립니다...) 그립을 좀 해결해 보자고 애꿎은 마우스 패드를 잘라서 붙여보고 했는데도 소용이 없더군요 ;ㅅ;
아... 이런 삽질 끝에 결국 졸업작품 전시회로 갔습니다. 물론 코딩은 개판5분전이죠...그저 앞으로가 뒤로가 왼쪽 오른쪽으로 회전해 팔 위아래로 내려 손오므려 펴, 이런 명령만 조합한게 전부였습니다. 게다가 자리는 어찌나 좁았던지..... 코딩 수정할 노트북 하나에 로봇 올려놓으니깐 자리가 꽉차더군요....(작은 강의실보다 좀 더 큰 세미나실인데 거기에 작품들 40여개 전시해 놨다고 생각해보세요....)
아무튼 자리는 좁으니 보여줄건.... 종이컵 하나 집어서 앞으로 간 다음에 구경꾼에게 전달하고 뒤로빠지는 그런 행동밖에 못보여주죠....(본체 왼쪽, 오른쪽 도는건.... 솔직히 스텝 계산을 못했어요...ㄱ-)
그러면서 교수님들 말씀하시는게......
이거 물건 주는 매너 없구만.(손이 종이컵 딱 떨굴때...)
물 다 쏟아지겠군...
자네가 직접 만들었나?
이런 식의 말씀들이었죠.... 딱히 보여줄만한건 1분도 안됐으니 교수님들은 보고 그냥 다른 곳으로 돌아보러가시고...
아무튼 힘들어 죽겠습니다......어제부터 풀가동하면서 다듬은 터라 긴장감이 풀려야 하지만........
아직 디지털 집적회로 FSM이 남았습니다... 좀 이따 6시 반에 교수님과 직접 면담을 해야 한다구요!!!!!!
이러니 어떻게 긴장감이 풀릴 수 있겠어요 ;ㅅ;
아무튼 저는 이만 물러납니다.......
이번 주말,
포스가 넘치는 주말이 되길 바랍니다^^ (마지막 사진은 제가 이번 졸작때 낸 로봇입니다....ㄱ- 허접해도 참아주시길.....)

근데..
그런데 로봇팔 회전판과 손에 있는 서보모터에다 신호를 PWM을 인가도 안하고 바로 타이밍을 줬을경우에... 아시는분은 아시리라 봅니다....
무슨 뜻인지??
영 모르겠어요 ^^